Algebraic Topology in Distributed Computing: Wait-Free Solvability and Simplicial Complexes
Discover how algebraic topology — simplicial complexes, Sperner's lemma, and homology — provides the deepest known framework for understanding what concurrent and distributed tasks are fundamentally solvable, as developed in Herlihy and Shavit's 'The Art of Multiprocessor Programming'.
Contents
Here is a puzzle that stumped the distributed computing community for years. We have (n) processes, each with a private input value. They communicate by reading and writing shared memory registers. Any process can crash at any time — the famous wait-free model: a process must complete its task in a finite number of its own steps, regardless of what other processes do (including crashing silently). The task is consensus: all processes must agree on a common output value, and that value must be some process’s input.
Is consensus wait-free solvable using only atomic read/write registers?
The answer, proved by Fischer, Lynch, and Paterson in 1985 (the celebrated FLP result) for the asynchronous message-passing model, and independently for shared memory by Loui and Abu-Amara (1987) and Herlihy (1991), is a resounding no. But the FLP proof, while correct, is unsatisfying in a particular way: it is an operational impossibility proof, constructing an infinite non-terminating execution step by excruciating step. It tells us that consensus is impossible, but not why — not at a structural level that would let us predict, for any given task, whether it is solvable or not.
Enter algebraic topology.
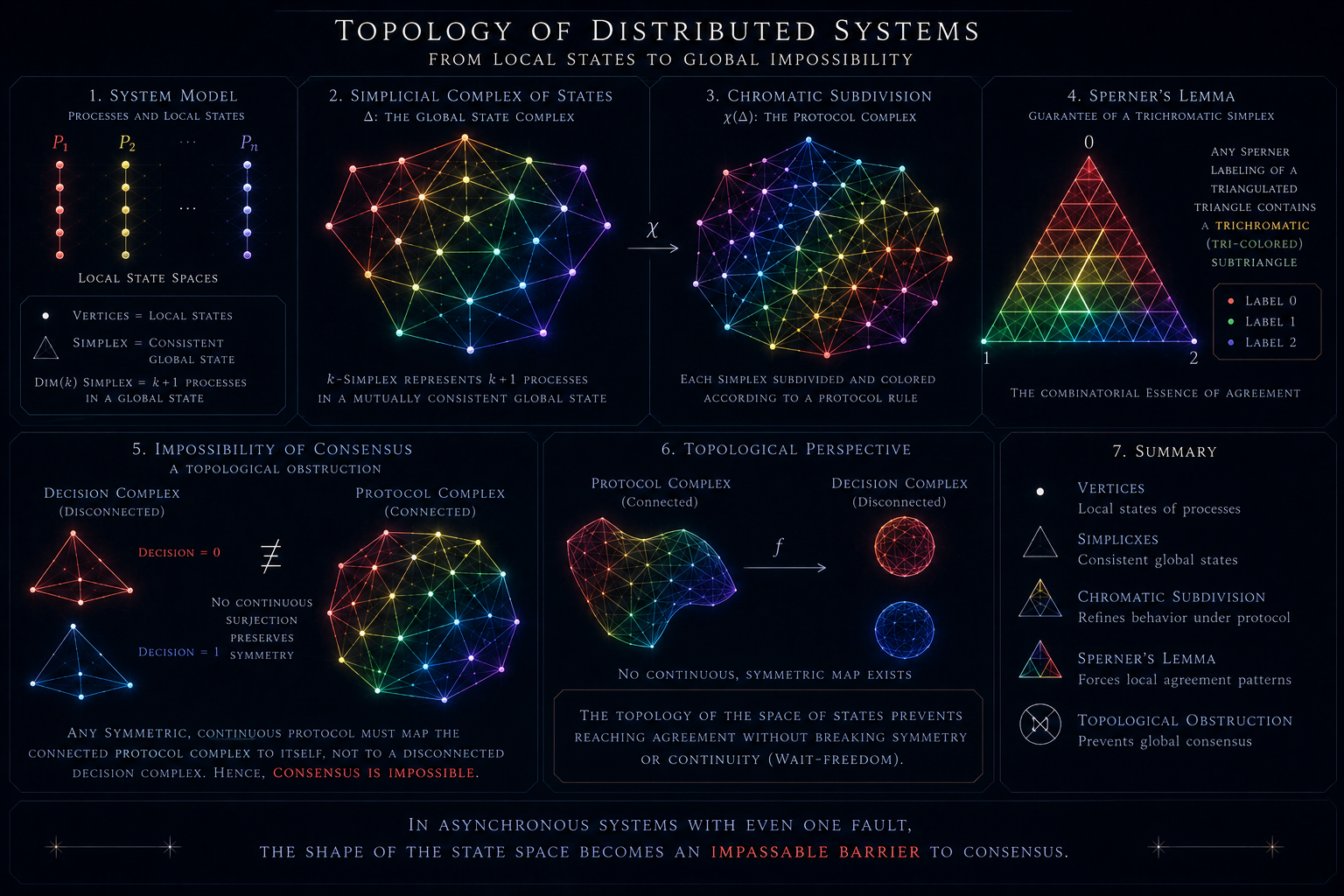
In a stunning series of results spanning the 1990s and 2000s, researchers led by Maurice Herlihy, Nir Shavit, Hagit Attiya, and their collaborators discovered that the fundamental obstacle to wait-free computability is not operational but topological. The state space of a distributed computation forms a simplicial complex — a high-dimensional triangulated structure. The protocol evolves by subdividing this complex. The task’s input-output specification defines a continuous map between complexes. And the task is wait-free solvable if and only if there exists a simplicial map from a subdivision of the input complex to the output complex that agrees with the task specification.
This article develops that story from the ground up. We define the wait-free model, build the machinery of simplicial complexes, state and apply Sperner’s lemma, prove the impossibility of consensus and (k)-set agreement, and explore the Asynchronous Computability Theorem — the crowning achievement of topological distributed computing theory. The mathematics is abstract, but the payoff is extraordinary: a single unified framework that explains dozens of impossibility results and guides the design of new protocols.
1. The Wait-Free Computation Model
Before topology, we must define the computational model precisely. The model is shared memory with atomic snapshots.
1.1 Processes, Registers, and Crashes
We have (n+1) processes (P_0, P_1, \dots, P_n) (indexed by (n+1) is traditional because an (n)-dimensional simplex has (n+1) vertices). Each process has a distinct identifier (PID). Processes communicate via an unbounded array of atomic single-writer multi-reader (SWMR) registers — each register is written by exactly one process and can be read atomically by any process. Alternatively, we may assume atomic snapshots: a process can atomically read all registers in a single operation. This is equivalent in computational power to SWMR registers (wait-free implementable from them).
A process executes a protocol: a deterministic state machine that, given its current state and the result of its most recent shared memory operation, determines its next operation (read, write, or decide and halt). A process can crash at any point: after a crash, it performs no further steps. The other processes have no way to detect whether a process has crashed or is merely slow. This is the wait-free requirement: every non-faulty process must decide after a finite number of its own steps, regardless of crashes.
1.2 Tasks and Decision Tasks
A task (\langle \mathcal{I}, \mathcal{O}, \Delta \rangle) is defined by:
- An input complex (\mathcal{I}): each vertex is a pair ((P_i, v)) where (P_i) is a process and (v) is its input value from some finite set. A simplex of (\mathcal{I}) is a set of vertices with distinct process IDs representing a possible initial configuration.
- An output complex (\mathcal{O}): similarly, each vertex is ((P_i, w)) where (w) is an output value. A simplex is a set of outputs for distinct processes.
- A task specification (\Delta): a map from simplexes of (\mathcal{I}) to sets of simplexes of (\mathcal{O}), specifying which output assignments are legal for each input assignment.
For consensus, the input values come from ({0, 1}). The task specification requires that all processes output the same value, and that value must be some process’s input. For a two-process system, (\mathcal{I}) consists of four possible initial configurations: (0,0), (0,1), (1,0), (1,1), represented as edges (1-simplexes) between distinct process-input vertices. (\Delta) maps (0,0) to the set ({{(P0,0), (P_1,0)}}); (1,1) to ({{(P_0,1), (P_1,1)}}); and mixed inputs (0,1) and (1,0) to _both ({{(P_0,0), (P_1,0)}, {(P_0,1), (P_1,1)}}) — they can decide either value, but must agree.
2. Simplicial Complexes: The Topological Toolkit
We need to represent system states geometrically. The central object is the simplicial complex.
2.1 Definition and Intuition
A simplicial complex (\mathcal{K}) is a collection of finite non-empty sets (called simplexes) such that:
- Any non-empty subset of a simplex in (\mathcal{K}) is also in (\mathcal{K}) (closure under taking faces).
- A singleton ({v}) in (\mathcal{K}) is called a vertex. The set of all vertices is denoted (V(\mathcal{K})).
The dimension of a simplex (\sigma) is (|\sigma| - 1). A simplex of dimension (k) is called a (k)-simplex. The dimension of a complex is the maximum dimension of its simplexes.
Geometric intuition: a 0-simplex is a point (vertex), a 1-simplex is an edge (line segment between two vertices), a 2-simplex is a triangle (filled triangle with three vertices), a 3-simplex is a tetrahedron, and so on. A simplicial complex is a way to glue simplexes together along shared faces, forming a topological space.
For distributed computing, the crucial complex is the chromatic complex: each vertex is labeled with a process ID (its “color”), and every simplex has vertices with distinct colors. A simplex in a chromatic complex represents a consistent global state: it contains one vertex per participating process, each labeled with that process’s local state.
2.2 The Input Complex
For a task with (n+1) processes, the input complex (\mathcal{I}) captures all possible initial configurations. If each process (P_i) can have input from a set (V_i), then (\mathcal{I}) is the pseudosphere (\Psi(V_0, \dots, V_n)):
- Vertices are all pairs ((P_i, v)) for (v \in V_i).
- A set of vertices ({(P*{i_0}, v*{i0}), \dots, (P{ik}, v{i_k})}) is a simplex if all process IDs are distinct.
- The complex has dimension at most (n) (when all (n+1) processes have inputs).
For binary consensus with two processes, the input complex (\mathcal{I}) consists of four 0-simplexes (vertices): the four input assignments ((P_0,0)), ((P_0,1)), ((P_1,0)), ((P_1,1)). The 1-simplexes (edges) are ({(P_0,0), (P_1,0)}), ({(P_0,0), (P_1,1)}), ({(P_0,1), (P_1,0)}), ({(P_0,1), (P_1,1)}). Graphically, this is a square: the four possible initial states.
For (k)-set agreement (where processes must agree on at most (k) distinct values), the output complex (\mathcal{O}) consists of all simplexes with at most (k) distinct output values.
2.3 Simplicial Maps
A simplicial map (f: \mathcal{K} \to \mathcal{L}) maps vertices of (\mathcal{K}) to vertices of (\mathcal{L}) such that if (\sigma = {v_0, \dots, v_k}) is a simplex in (\mathcal{K}), then (f(\sigma) = {f(v_0), \dots, f(v_k)}) is a simplex in (\mathcal{L}). In other words, simplexes map to simplexes — the map preserves the combinatorial structure. A simplicial map is chromatic if it preserves process IDs: each vertex ((P_i, \cdot)) maps to another vertex ((P_i, \cdot)).
A task specification (\Delta) can be viewed as a carrier map from (\mathcal{I}) to (\mathcal{O}): for each input simplex (\sigma), (\Delta(\sigma)) is a subcomplex of (\mathcal{O}). The task is solvable if there exists a chromatic simplicial map (\delta) from a subdivision of (\mathcal{I}) to (\mathcal{O}) such that for every simplex (\sigma \in \mathcal{I}), (\delta) restricted to the subdivision of (\sigma) maps into (\Delta(\sigma)). This is the essence of the Asynchronous Computability Theorem (ACT).
2.4 Barycentric and Chromatic Subdivisions
A subdivision of a simplicial complex replaces each simplex with smaller simplexes, refining the structure without changing its topology. The barycentric subdivision is the most fundamental: for each simplex, add a new vertex at its barycenter (average of its vertices) and triangulate.
For distributed computing, the relevant subdivision is the standard chromatic subdivision (\operatorname{Ch}(\mathcal{K})). It models the effect of one round of the Immediate Snapshot (IS) protocol, where each process writes to its register and then takes an atomic snapshot of all registers. The resulting protocol complex after one round is exactly (\operatorname{Ch}(\mathcal{I})).
The chromatic subdivision of a 1-simplex (an edge) is a path of three 1-simplexes (edges): the original two vertices plus a new vertex in the middle representing the state where both processes have written but seen each other’s values, flanked by vertices where only one process has seen both values. For a 2-simplex (triangle), the chromatic subdivision is a hexagon of small triangles.
2.5 The Protocol Complex
After (r) rounds of the IS protocol starting from input complex (\mathcal{I}), the reachable states form the protocol complex (\mathcal{P}^r = \operatorname{Ch}^r(\mathcal{I})) — the (r)-th iterated chromatic subdivision. Each vertex in (\mathcal{P}^r) represents a possible local state of a process after (r) rounds: its input, plus the sequence of snapshots it observed. A simplex in (\mathcal{P}^r) represents a consistent set of local states that could coexist after (r) rounds.
The protocol complex is the key object linking computation to topology. The protocol evolves deterministically, but the set of all possible states after (r) rounds forms the subdivision. Because of asynchrony and crashes, the “decision map” that a protocol computes must be a simplicial map defined on some subdivision of the input complex.
3. Sperner’s Lemma and Connectivity Arguments
We now need the second key topological tool: Sperner’s lemma (1928), a combinatorial result about coloring triangulations that is equivalent to the Brouwer fixed-point theorem.
3.1 Sperner’s Lemma
Consider a triangle (2-simplex) whose vertices are colored with three distinct colors — say, red, green, and blue. Subdivide the triangle arbitrarily into smaller triangles (a triangulation). Color each vertex of the subdivision with one of the three colors, subject to the Sperner coloring condition:
- A vertex on an edge of the original triangle must be colored with one of the two colors of that edge’s endpoints.
- Interior vertices may be colored arbitrarily.
Sperner’s lemma asserts: In any such coloring, there exists a fully-colored small triangle — one whose three vertices have all three distinct colors. Moreover, the number of fully-colored triangles is odd (hence, at least one exists).
The (n)-dimensional generalization: For an (n)-simplex colored with (n+1) colors under the natural Sperner condition, there is an odd number of fully-colored (n)-simplexes in any triangulation.
3.2 Why Sperner Matters for Distributed Computing
The connection is this: A wait-free protocol using immediate snapshots induces a coloring on the subdivided protocol complex. The processes’ output decisions assign each vertex a value, and these decisions can be viewed as a coloring. The task specification (e.g., consensus requires all processes to output the same value) constrains the coloring on the boundary of the input complex (where some processes have crashed and only a subset participate).
If the task is impossible, Sperner’s lemma (or its generalizations via homology and the Index Lemma) forces a contradiction: the coloring cannot satisfy both the boundary conditions and the interior consistency requirements. The topological obstruction — a fully-colored simplex that should not exist — manifests as an execution where processes make inconsistent decisions.
3.3 Connectivity and the FLP Intuition
The FLP impossibility can be re-stated topologically: the protocol complex for consensus remains connected (specifically, 0-connected — there is a path between any two vertices in the 1-skeleton), while the output complex for consensus is disconnected (it consists of two separate components: the all-0 simplex and the all-1 simplex). A continuous map from a connected space to a disconnected space must map all points to the same connected component — which would violate the input-output specification that says both outputs must be possible depending on inputs.
This is the high-level reason consensus is impossible: the protocol complex cannot “break” the connectivity of the input complex sufficiently to map into both output components. Any wait-free protocol preserves some degree of connectivity that the task specification demands be broken.
4. The Asynchronous Computability Theorem
The Asynchronous Computability Theorem (ACT), proved by Herlihy and Shavit (1993, 1999), provides the exact topological characterization of wait-free solvability.
4.1 Statement of the Theorem
A task (\langle \mathcal{I}, \mathcal{O}, \Delta \rangle) is wait-free solvable in the IIS (iterated immediate snapshot) model if and only if there exists a chromatic simplicial map (\delta) from some iterated standard chromatic subdivision (\operatorname{Ch}^N(\mathcal{I})) to (\mathcal{O}) that is carried by (\Delta): for every simplex (\sigma \in \mathcal{I}),
[ \delta(\operatorname{Ch}^N(\sigma)) \subseteq \Delta(\sigma) ]
In simpler terms: you can subdivide the input complex finely enough (corresponding to running enough rounds of the protocol), and then “fold” the subdivision into the output complex in a way that preserves colors (process IDs) and respects the task specification.
The ACT is both an impossibility result and an algorithm design principle:
- If no such map exists for any (N), the task is impossible — no wait-free protocol exists.
- If such a map exists, it is a protocol: each vertex in the subdivision corresponds to a process state after some number of rounds, and the simplicial map tells that process what to decide.
4.2 The IIS Model and Its Equivalence
The IIS (Iterated Immediate Snapshot) model, introduced by Borowsky and Gafni (1993), is beautifully simple. In each round:
- Each process writes its current state to its dedicated register.
- Each process takes an immediate snapshot: it reads a subset of the registers written in this round, with the guarantee that the set of snapshots is well-ordered by inclusion — if process (P)’s snapshot includes (Q)’s write, then (Q)’s snapshot is a subset of (P)’s.
This well-ordering property captures the essence of asynchrony: processes see each other’s writes, but not necessarily all of them, and the views are nested. The IIS model is wait-free equivalent to the standard shared memory model with atomic snapshots — any protocol in one can be simulated in the other. The IIS model is preferred for topological analysis because each round corresponds exactly to one chromatic subdivision.
4.3 Example: Proving Consensus Impossibility
For binary consensus with two processes ((n+1 = 2)), the input complex (\mathcal{I}) is a cycle of four edges: (00-01-11-10-00). (Here, edge (ab) means process 0 has input (a), process 1 has input (b).) The output complex (\mathcal{O}) consists of two disjoint edges: ({(P_0,0), (P_1,0)}) and ({(P_0,1), (P_1,1)}).
(\mathcal{I}) is connected (cyclic). Any finite chromatic subdivision (\operatorname{Ch}^N(\mathcal{I})) remains connected — subdivision does not disconnect a space. A simplicial map from a connected space to a totally disconnected space (two separate edges with no shared vertices) is impossible while remaining chromatic. The two monochromatic output edges have no common vertices, so the image of the connected input cycle would need to jump between them at some point — a discontinuity. Therefore, no such (\delta) exists, and consensus is impossible.
4.4 The Index Lemma and (k)-Set Agreement
For (k)-set agreement — where (n+1) processes must agree on at most (k) distinct output values — the topological obstruction is more subtle. The impossibility for (k < n) was proved using the Index Lemma (a generalization of Sperner’s lemma) by Herlihy and Shavit (1993), and the general case by Saks and Zaharoglou (2000) using the Sperner’s Lemma for pseudomanifolds.
The intuition: (k)-set agreement requires the output complex to have no simplexes with more than (k) distinct values. The protocol complex after any number of rounds has the property that its ((n-k))-dimensional homology is non-trivial — there is an ((n-k))-dimensional “hole” that cannot be contracted. The existence of this hole (measured by the kernel of the boundary operator, or by the non-existence of certain Sperner colorings) prevents a simplicial map into the output complex. The index of the map — essentially, the winding number — must be non-zero, but the output complex’s structure forces it to be zero, a contradiction.
This topological proof unifies and generalizes the operational proofs that (k)-set agreement is impossible for (k < n). It also shows exactly where the boundary lies: (\ell)-set agreement (with (\ell) output values) is possible if and only if (\ell \geq n+1) (trivial) or (\ell \geq k+1) under certain conditions.
4.5 Beyond Binary Consensus: The General Pattern
The topological framework reveals a recurring pattern for impossibility proofs:
- Model the inputs: Construct the input complex (\mathcal{I}) whose simplexes are all possible initial configurations.
- Model the protocol: Show that after any number of rounds, the protocol complex (\mathcal{P}) is a chromatic subdivision of (\mathcal{I}). Crucially, (\mathcal{P}) is link-connected or has certain homology groups that are invariant under subdivision.
- Model the task: The output complex (\mathcal{O}) encodes the tasks legal outputs. A task is solvable iff there exists a chromatic simplicial map (\delta: \mathcal{P} \to \mathcal{O}) carried by (\Delta).
- Find the obstruction: Prove that no such map can exist because (\mathcal{P}) has a topological property (connectivity, non-trivial homology, non-zero index) that (\mathcal{O}) cannot accommodate given (\Delta).
This template has been applied to prove the impossibility of:
- Consensus (Herlihy 1991, via connectivity)
- k-set agreement (Herlihy-Shavit 1993, Borowsky-Gafni 1993, Saks-Zaharoglou 2000, via homology)
- Approximate agreement on more than two values (via connectivity)
- Renaming with too few names (via index arguments)
- Stable vector agreement (via homology)
Each impossibility result follows the same topological template, even though the operational proofs for these tasks look entirely different. The topology provides the unifying structure that explains why these tasks are hard: they demand that the protocol complex have a topological property that wait-free computation cannot achieve.
4.6 Constructing Protocols from Simplicial Maps
When a simplicial map (\delta: \operatorname{Ch}^N(\mathcal{I}) \to \mathcal{O}) does exist, it is not merely a proof of solvability — it is the protocol. Here is how the protocol is extracted:
- Each vertex (v) in (\operatorname{Ch}^N(\mathcal{I})) corresponds to a specific process (P_i) in a specific state after (N) rounds of IS. The state includes that process’s entire view of the execution: its input, the sequence of snapshots it observed in each round, and the values it read from other processes.
- The map (\delta) assigns to each such vertex an output value (w = \delta(v)). Since (\delta) is chromatic, process (P_i)’s output depends only on (P_i)’s own local state — which is exactly what a wait-free protocol requires (a process can only act on what it has seen).
- The fact that (\delta) maps simplexes to simplexes guarantees consistency: if a set of processes’ states could coexist in some execution (forming a simplex), their outputs are also mutually consistent (forming a simplex in (\mathcal{O})).
Thus, the topological theory is not merely about impossibility — it provides a complete characterization of what can and cannot be computed wait-free, and it gives a systematic method for designing protocols when they exist.
5. The BG Simulation and Distributed Computability
The topological framework extends beyond the IIS model to characterize computability in other distributed models.
5.1 The Borowsky-Gafni (BG) Simulation
The BG simulation (1993, later refined by Lynch and Rajsbaum) shows that any asynchronous message-passing system with at most (t) crash failures can be simulated by a wait-free system with (t+1) processes using shared memory. This reduction is profound: it means that the topological theory of wait-free computability applies directly to the asynchronous message-passing model.
The simulation works by having the (t+1) simulator processes collectively simulate the (n) original processes. Each simulator is responsible for a subset of the original processes. When a simulator crashes, it takes down all the original processes assigned to it — which is at most (n) total crashes since there are (t) failures among (n) processes and (t+1 \leq n). The key invariant: the set of active original processes always has size at most (t+1), which can be simulated by (t+1) wait-free processes.
5.2 The Unified Picture
The BG simulation establishes a hierarchy: the wait-free shared memory model with (t+1) processes is the “hardest” model in the sense that if a task is solvable there, it is solvable in any system with fewer failures. Conversely, impossibility results in the wait-free model imply impossibility in the message-passing model.
This unifies the topological theory: the chromatic subdivision framework characterizes solvability across a range of models, with the number of processes in the wait-free simulator corresponding to the resilience parameter (maximum number of tolerated failures plus one).
5.3 Generalizing to Other Failure Models
The topological approach has been extended to:
- Byzantine failures: The complexes become more complex because Byzantine processes can send contradictory information, but the simplex/connectivity framework still applies. Byzantine consensus impossibility requires (n > 3t) (as Lamport, Shostak, and Pease proved), and the topological analogue involves more elaborate complexes with “Byzantine vertices” that can appear in inconsistent simplexes.
- (t)-resilient model: Up to (t) processes can fail. The topological framework handles this via the BG simulation, reducing to wait-free with (t+1) processes.
- Asynchronous renaming: Where processes must pick distinct names from a small namespace. The topological theory gives tight bounds on the minimal namespace size as a function of (n).
6. Beyond Wait-Free: Other Models and Topological Insights
6.1 Read-Write Memory vs Stronger Primitives
Herlihy’s 1991 consensus hierarchy classified shared memory primitives by their consensus number — the maximum number of processes for which they can solve wait-free consensus. Atomic read/write registers have consensus number 1 (they can solve consensus for 1 process, trivially). Test-and-set has consensus number 2. Compare-and-swap (CAS) has consensus number (\infty) — it can solve consensus for any number of processes.
Topologically, a primitive with consensus number (c) can “break” connectivity up to dimension (c-1). CAS can break connectivity in all dimensions, which is why it can solve consensus. The consensus hierarchy can be understood as measuring the ability of a synchronization primitive to subdivide the protocol complex sufficiently to map into a disconnected output complex.
6.2 Set Consensus and the Power of Registers
While registers cannot solve consensus, they can solve (k)-set agreement for appropriately chosen (k). Specifically, wait-free (k)-set agreement is possible using only registers if and only if (k \geq n+1) (trivial) or the algorithm has some other constraint. Chaudhuri (1990) introduced (k)-set agreement and conjectured its impossibility for (k \leq n); this was proved in the topological framework using the Index Lemma.
6.3 Write-Snapshot and Immediate Snapshot as Universal Primitives
Remarkably, the immediate snapshot (IS) operation — write your value, then atomically read a snapshot of all values — is universal for wait-free computation: any wait-free solvable task has a protocol in the IIS model. This follows from the ACT. The IS operation has consensus number 1 (it cannot solve consensus), but combined with iterated rounds, it can solve exactly the tasks that are wait-free solvable. This universality is why the topological theory focuses on the IS model.
7. The Beauty of the Topological Approach
The topological approach to distributed computing is, in my view, one of the most beautiful intellectual achievements in computer science. It takes a domain — concurrent and distributed computation — that seems irreducibly operational (messages, crashes, timing, interleaving) and reveals that its fundamental limits are governed by the same geometric constraints that determine whether you can comb a sphere flat or color a triangulated triangle.
7.1 Why Topology?
The deep reason topology enters distributed computing is that uncertainty creates continuity. When a process cannot distinguish between two possible global states (because it hasn’t read some registers, or some messages haven’t arrived), those two states must be “close” in the protocol complex — they must lie in the same simplex, or in adjacent simplexes. The protocol complex is thus forced to be a triangulated manifold whose connectedness reflects the indistinguishability relations of the asynchronous model.
As the protocol executes more rounds, the protocol complex becomes a finer subdivision of the input complex — but it never changes its essential topological type (its homotopy or homology). The task specification, however, may demand that the output complex have a different topological type (e.g., be disconnected for consensus, or have higher connectivity for certain agreement tasks). The impossibility arises from the mismatch between the topological invariant of the protocol complex (which is preserved by subdivision) and the topological invariant demanded by the task.
7.2 From Combinatorics to Homology
The simplest topological arguments use Sperner’s lemma and connectivity (0-dimensional topology — path-connectedness). More sophisticated arguments use homology groups (H_k(\mathcal{K})) and homotopy groups (\pi_k(\mathcal{K})) to detect higher-dimensional obstructions. For example, the impossibility of (k)-set agreement for general (n, k) was proved using the ((n-k))-th homology group of the protocol complex.
The chain of reasoning typically goes:
- The protocol complex (\mathcal{P}) has non-trivial homology groups (H_d(\mathcal{P}) \neq 0) for some dimension (d) (often (d = n - k)).
- Any chromatic simplicial map (\delta: \mathcal{P} \to \mathcal{O}) induces a map on homology: (\delta_*: H_d(\mathcal{P}) \to H_d(\mathcal{O})).
- The task specification forces (\delta_*) to be the zero map on homology groups.
- But the index/winding number argument shows that any such map must have a non-trivial image in homology.
- Contradiction. Therefore, no such map exists.
This template proves impossibility for a wide range of tasks: consensus, set agreement, approximate agreement, renaming, and extensions.
7.3 The Epistemology of Distributed Computing
There is a deeper philosophical point lurking beneath the topology. The protocol complex encodes not just what states are reachable, but what processes know about each other’s states. Two global states that a process cannot distinguish locally must be “nearby” in the protocol complex — they must share a vertex labeled with that process’s local state. The topological connectedness of the protocol complex reflects the indistinguishability relations that constrain what processes can deduce.
This connects distributed computing to epistemic logic (the logic of knowledge). The topological obstructions to wait-free solvability correspond to limits on what can become common knowledge in an asynchronous system. Halpern and Moses (1990) showed that common knowledge is unattainable in asynchronous systems — a result that parallels the topological connectivity arguments. The two perspectives — epistemic and topological — reinforce each other: the protocol complex must remain connected because processes cannot distinguish enough states to break the connectivity, and they cannot break the connectivity because they cannot achieve common knowledge of which states are possible.
This convergence of topology, logic, and distributed computing is one of the richest intellectual intersections I know. It shows that the limits of computation are not merely engineering constraints to be overcome by cleverer algorithms, but mathematical necessities that arise from the geometry of knowledge itself.
8. Conclusion
The topological theory of distributed computing is a triumph of cross-disciplinary thinking. It brings the machinery of algebraic topology — simplicial complexes, barycentric subdivisions, Sperner’s lemma, homology, the Index Lemma — to bear on the most practical question in distributed systems: can this be done?
The key insights to carry forward:
- System states are simplexes. A consistent global state with (k+1) participating processes is a (k)-simplex. The set of all possible states forms a simplicial complex.
- Protocols subdivide. One round of an immediate-snapshot protocol corresponds to the standard chromatic subdivision. Multiple rounds iterate this subdivision. The protocol complex is always a subdivision of the input complex.
- Tasks are maps between complexes. A task specification (\Delta) defines which output simplexes are legal for each input simplex. A wait-free protocol is a chromatic simplicial map from a sufficiently subdivided input complex to the output complex that respects (\Delta).
- Impossibility = topological obstruction. Consensus is impossible because the input complex is connected but the output complex is disconnected, and subdivision preserves connectivity. Set agreement is impossible because the homology of the protocol complex does not vanish in a dimension where the task demands it vanish.
- The BG simulation unifies models. The wait-free shared memory model with (t+1) processes simulates any (t)-resilient message-passing system, so topological impossibility results in the former apply to the latter.
The theory is not just about impossibility. It also guides protocol design: if a simplicial map exists, the map itself is the protocol — each vertex in the subdivision tells the corresponding process what to decide. The map can be constructed explicitly (though not always efficiently), giving a constructive proof of solvability.
At a deeper level, the topological approach reveals that distributed computing is fundamentally geometric. The impossibility of consensus is the same phenomenon as the impossibility of retracting a disk onto its boundary while keeping the boundary fixed — a fact that Brouwer proved in 1911 and that Sperner made combinatorial in 1928. That the same mathematics governs whether a group of asynchronous processes can agree on a single bit is a testament to the profound unity of mathematics and computer science.
The next time you design a distributed protocol and wonder whether it can be made wait-free, remember: the answer lies not in some clever interleaving argument, but in the homology groups of the protocol complex. Topology constrains what distributed algorithms can do — not as a metaphor, but as a mathematical fact, as rigorous and inescapable as the conservation of energy. The art of multiprocessor programming is, at its deepest level, the art of triangulating the possible.
For those who wish to dive deeper, the canonical reference is Herlihy, Kozlov, and Rajsbaum’s “Distributed Computing Through Combinatorial Topology” (2014), which develops the entire theory systematically. The original Herlihy-Shavit papers from the 1990s remain remarkably readable and convey the excitement of discovering that the geometry of high-dimensional triangles could answer the most vexing questions about concurrent computation. It is, without exaggeration, one of the most original syntheses of mathematics and computer science ever achieved — a reminder that the deepest answers often lie not in more engineering, but in more abstraction.